Ürünün sabit bir konumu olmadığı üretim hatlarında doğru kamera tipi, çözünürlük ve hız dengesiyle başlar.
Sürekli muayene uygulamalarında en kritik kararlardan biri kamera tipidir. Üründe sabit bir konum yoktur; rulo, şerit ya da parça hattan akıp geçer. Burada line scan ve area scan kameralar arasındaki seçim sadece bir donanım tercihi değildir. Çözünürlük, hız ve maliyet arasında kurduğunuz dengenin sonucudur.
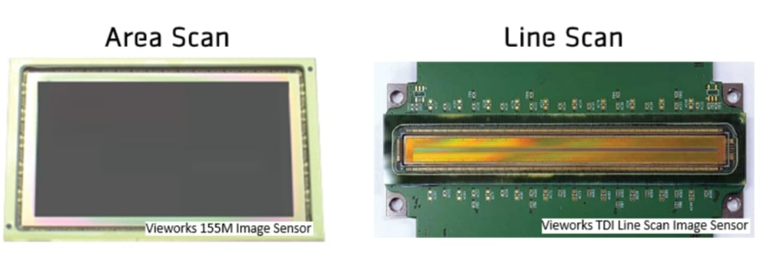
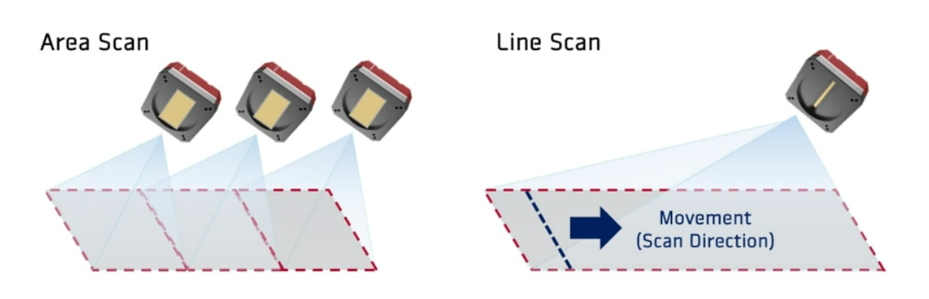
İki kamera tipi arasındaki fark sensörden başlar. Area scan kameralarda pikseller iki boyutlu bir matris hâlinde dizilir; line scan kameralarda ise pikseller tek bir satır (bazı modellerde birkaç satır) boyunca uzanır. Görüntünün nasıl oluştuğu bu temel farktan doğar.
Area Scan Kameralar
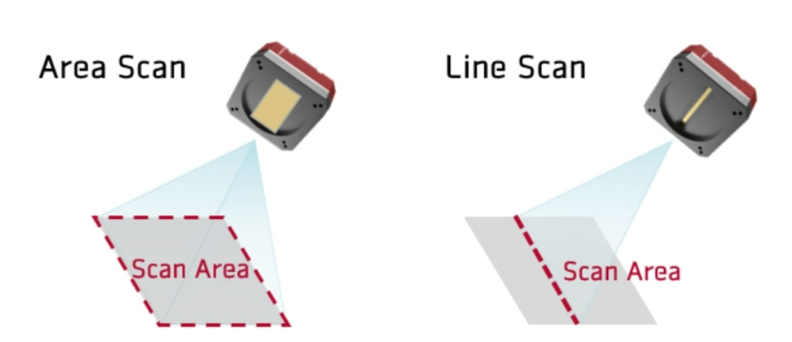
Area scan kameralar görüntüyü iki boyutlu bir sensör üzerinden kare kare yakalar. Tıpkı bir fotoğraf makinesi gibi, belirli bir görüş alanını (FOV) tek seferde pozlar ve okur. Bu yapı; geometrisi belli, sınırları net ve tek karede çerçeveye sığan parçalar için idealdir. Kesikli (indexed) hatlarda parça istasyona gelir, durur, görüntü alınır ve hat ilerler. Kurulum görece basittir: tetikleme ve aydınlatma tek bir poz anına göre ayarlanır.
Ancak area scan yaklaşımının doğal bir sınırı vardır. Çözünürlük, sensörün piksel sayısıyla sınırlıdır. Çok uzun ya da sonsuz bir yüzeyi yüksek detayla taramak isterseniz iki seçeneğiniz olur: ya FOV'u büyütüp piksel başına düşen detaydan feragat edersiniz ya da birçok kareyi üst üste bindirip karmaşık bir birleştirme (stitching) işine girersiniz.

Line Scan Kameralar
Line scan kameralar yalnızca tek satırlık (bazı modellerde birkaç satırlık) bir sensöre sahiptir. Görüntü, nesne kamera önünden geçerken satır satır oluşur. Buradaki kritik bileşen, hat hızını kameraya bildiren bir encoder'dır. Encoder sinyali her satır yakalamasını malzemenin gerçek hareketiyle senkronlar. Böylece hat hızlansa da yavaşlasa da görüntünün en/boy oranı bozulmaz ve geometrik olarak doğru kalır.
Satırların ne kadar hızlı okunduğu, line scan kameranın satır frekansı (line rate) ile belirlenir. Tipik kameralar saniyede on binlerce satır okur; örneğin 18 kHz'lik bir kamera her satırı yaklaşık 55 mikrosaniyede yakalar. Modern CMOS line scan sensörlerinde bu hız 100 kHz'in üzerine çıkabilir. Satır frekansı, hat hızı ve istenen çözünürlükle birlikte hattın ne kadar hızlı akabileceğini doğrudan sınırlar.
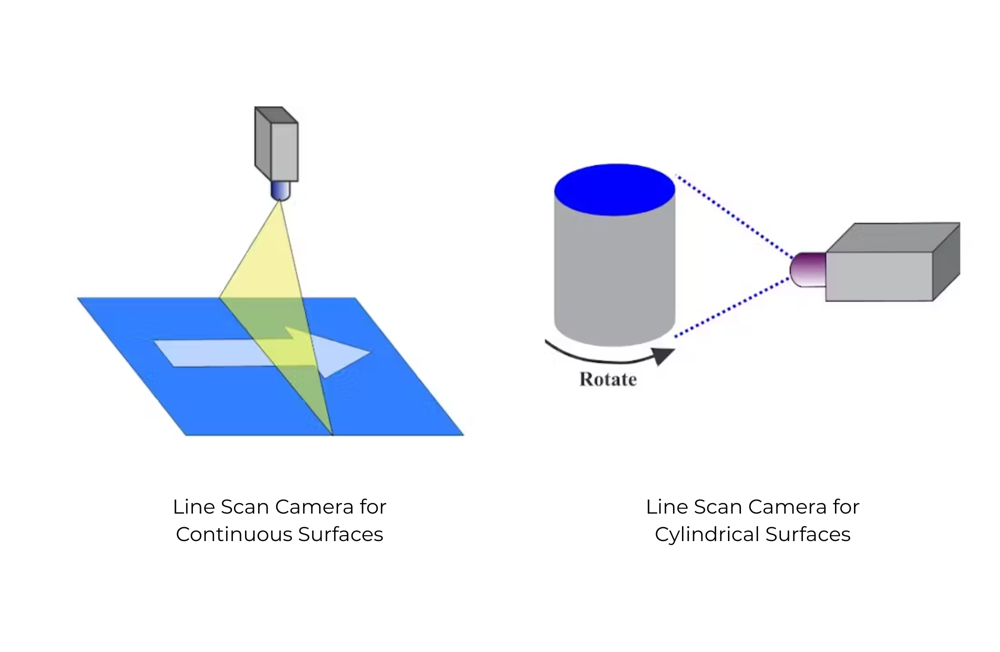
Bu prensip, line scan kameraları sürekli hareket eden web malzemeleri için biçilmiş kaftan yapar. Kağıt, tekstil, metal levha, folyo, cam ve plastik film gibi rulodan ruloya akan tüm yüzeyler bu gruba girer. Satır birikimiyle oluşan görüntünün boyu pratikte sınırsızdır; hat ilerledikçe devasa ve kesintisiz bir görüntü elde edersiniz. Bu kameralar yatay yönde de çok yüksek çözünürlük sunar. 8K ve üzeri satır genişliğine sahip modellerle geniş bir bandı tek geçişte mikron seviyesinde muayene edebilirsiniz.
Line scan, dairesel ve silindirik yüzeylerde de belirgin bir avantaj sağlar. Şişe, kavanoz, boru ya da silindirik bir parça kendi ekseni etrafında dönerken kamera dış yüzeyi satır satır tarar ve eğri yüzeyi düz bir görüntüye "açar". Area scan ile böyle bir yüzeyin tamamını tek karede, bozulmadan görüntülemek çoğu zaman mümkün değildir.

Çözünürlük, Hız ve Maliyet Dengesi
Seçim genellikle üç parametrenin kesişiminde belirlenir. Area scan tarafında sistem daha basit ve çoğu uygulama için daha ekonomiktir; tetikleme ve aydınlatma kolay yönetilir. Line scan tarafında ise yüksek satır hızı ve sürekli akış kabiliyeti öne çıkar. Bunun bedeli encoder entegrasyonu, hassas mekanik ve daha güçlü, kararlı bir aydınlatmadır.
| Kriter | Line Scan | Area Scan |
|---|---|---|
| Görüntü oluşumu | Satır satır, sürekli | Kare kare, anlık |
| İdeal nesne | Sonsuz/uzun yüzey, silindirik parça | Kesikli, duran/çerçeveye sığan parça |
| Senkronizasyon | Encoder zorunlu | Basit tetikleme |
| Çözünürlük sınırı | En yönünde çok yüksek, boy sınırsız | Sensör piksel sayısıyla sınırlı |
| Kurulum karmaşıklığı | Yüksek | Düşük |
Aydınlatma ve Senkronizasyon Farkları
İki teknolojinin aydınlatma ihtiyaçları belirgin biçimde farklıdır. Area scan'de ışık tüm görüş alanını eşit aydınlatacak şekilde konumlanır ve poz anına senkronlanır. Line scan'de ise ışığın tamamı, taranan tek satıra (line) odaklanmalıdır. Bu yüzden line scan kurulumlarında genellikle yüksek yoğunluklu çizgi (line) aydınlatması kullanılır; çünkü her satır çok kısa sürede (mikrosaniyeler mertebesinde) pozlanır ve enerjinin ince bir bant üzerinde yoğunlaşması gerekir.
Bu kısa poz süresi, line scan'de ışığa duyarlılığı kritik hâle getirir. Pratikte iki yol öne çıkar. Birincisi büyük pikselli sensörler kullanmaktır; piksel alanı büyüdükçe topladığı ışık da artar. İkincisi ise birden çok satırlık (two-line, four-line) ya da TDI (time delay integration) sensörlerdir. TDI sensörler, hareket eden nesneyi takip ederek aynı noktanın sinyalini ardışık satırlar boyunca biriktirir; böylece yatay çözünürlükten ödün vermeden ışık duyarlılığını kat kat artırır. Bunun karşılığında hareket senkronizasyonunun çok daha hassas olması gerekir, çünkü en küçük kayma satırların üst üste hatalı binmesine ve bulanıklığa yol açar.
Senkronizasyon tarafında da yaklaşım ayrışır. Area scan'de çoğu zaman tek bir hardware trigger yeterlidir. Line scan'de ise encoder darbeleri satır tetiklemesini doğrudan malzeme hızına bağlar. Encoder ile kamera arasındaki bu sıkı bağ kurulmazsa, hattaki en küçük hız dalgalanması bile görüntüde sıkışma ya da gerilme olarak ortaya çıkar.
Hangi Senaryoda Hangisi?
Pratik bir karar çerçevesi şöyle özetlenebilir. Şu durumlarda line scan doğru tercihtir: sonsuz ya da çok uzun bir yüzeyi sürekli denetliyorsanız, en yönünde çok yüksek çözünürlük arıyorsanız ya da dairesel/silindirik bir parçanın dış yüzeyini açarak muayene edecekseniz. Buna karşılık parça hatta durarak konumlanıyorsa, geometrisi tek karede çerçeveye sığıyorsa ve kurulumu olabildiğince sade tutmak istiyorsanız area scan daha verimli ve ekonomik bir çözümdür.
Aremak kataloğunda hem Hikrobot hem The Imaging Source markalarından area scan ve line scan kameraları birlikte bulabilir, uygulamanıza göre kıyaslayabilirsiniz. Tüm seçenekleri endüstriyel kamera kategorisinde inceleyebilirsiniz.
Sonuç
Line scan ve area scan arasındaki seçim; malzemenin hareketine, yüzey geometrisine, gereken çözünürlüğe, hat hızına ve bütçeye birlikte bağlıdır. Doğru kararı tek başına bir tablo vermez; uygulamanızın gerçek koşulları belirler. Aremak mühendislik ekibi, hattınıza en uygun kamera tipini ve aydınlatma–senkronizasyon mimarisini birlikte netleştirmek için yanınızda. Ürün seçeneklerini endüstriyel kamera ürünlerimizden inceleyebilir, projenizi konuşmak için bizimle iletişime geçebilirsiniz.